
Upload README
Browse files- README.md +162 -0
- assets/collection.gif +3 -0
- assets/logo.png +3 -0
- assets/overview.png +3 -0
- assets/pose_tracking.gif +3 -0
- assets/registration.gif +3 -0
- assets/semantic_mapping.gif +3 -0
- assets/sensor_suite.png +3 -0
README.md
ADDED
|
@@ -0,0 +1,162 @@
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 1 |
+
# <div align = "center"><img src="assets/logo.png" width="5%" height="5%" /> SLABIM: </div>
|
| 2 |
+
|
| 3 |
+
## <div align = "center">A SLAM-BIM Coupled Dataset in HKUST Main Building</div>
|
| 4 |
+
|
| 5 |
+
<div align="center">
|
| 6 |
+
<a href="https://arxiv.org/abs/2502.16856"><img src="https://img.shields.io/badge/Paper-IEEE ICRA-004088.svg"/></a>
|
| 7 |
+
<!-- <a href="https://ieeexplore.ieee.org/document/10518010"><img src="https://img.shields.io/badge/Paper-ICRA-blue"/></a>
|
| 8 |
+
<a href="https://arxiv.org/abs/2308.11573"><img src="https://img.shields.io/badge/ArXiv-2308.11573-004088.svg"/></a> -->
|
| 9 |
+
<a href="https://www.youtube.com/watch?v=7NckgY15ABQ">
|
| 10 |
+
<img alt="Youtube" src="https://img.shields.io/badge/Video-Youtube-red"/>
|
| 11 |
+
</a>
|
| 12 |
+
<a ><img alt="PRs-Welcome" src="https://img.shields.io/badge/PRs-Welcome-red" /></a>
|
| 13 |
+
<a href="https://github.com/HKUST-Aerial-Robotics/SLABIM/issues">
|
| 14 |
+
<img alt="Issues" src="https://img.shields.io/github/issues/HKUST-Aerial-Robotics/SLABIM?color=0088ff"/>
|
| 15 |
+
</a>
|
| 16 |
+
</div>
|
| 17 |
+
|
| 18 |
+
> Haoming Huang, [Zhijian Qiao](https://qiaozhijian.github.io/), Zehuan Yu, Chuhao Liu, [Shaojie Shen](https://uav.hkust.edu.hk/group/), Fumin Zhang and [Huan Yin](https://huanyin94.github.io/)
|
| 19 |
+
>
|
| 20 |
+
> Submitted to 2025 IEEE International Conference on Robotics & Automation
|
| 21 |
+
|
| 22 |
+
### News
|
| 23 |
+
* **`17 Feb 2025`:** Download Links Updated.
|
| 24 |
+
* **`28 Jan 2025`:** Accepted by ICRA 2025.
|
| 25 |
+
* **`15 Sep 2024`:** We submit our paper to [IEEE ICRA](https://2025.ieee-icra.org/).
|
| 26 |
+
|
| 27 |
+
## Download
|
| 28 |
+
**Please click these below links to download:**
|
| 29 |
+
|
| 30 |
+
+ [**Calibration Files**](https://hkustconnect-my.sharepoint.com/:f:/g/personal/hhuangce_connect_ust_hk/EsRF4KSE2QNJhNe5pkGnlhsBjF2A4Y0_t6DhoPypFN3TnA)
|
| 31 |
+
+ [**BIM**](https://hkustconnect-my.sharepoint.com/:f:/g/personal/hhuangce_connect_ust_hk/EsFggIKoN01Hk6ZIKSrCLa4BuvIo4ut4I_Da9WmEgvxMqQ)
|
| 32 |
+
+ [**Sensor Data**](https://hkustconnect-my.sharepoint.com/:f:/g/personal/hhuangce_connect_ust_hk/Eu9IRQfbPJpGnTtmjgkrrigBopCUTe2gBJDAp8m5vqZZRw)
|
| 33 |
+
## Abstract
|
| 34 |
+
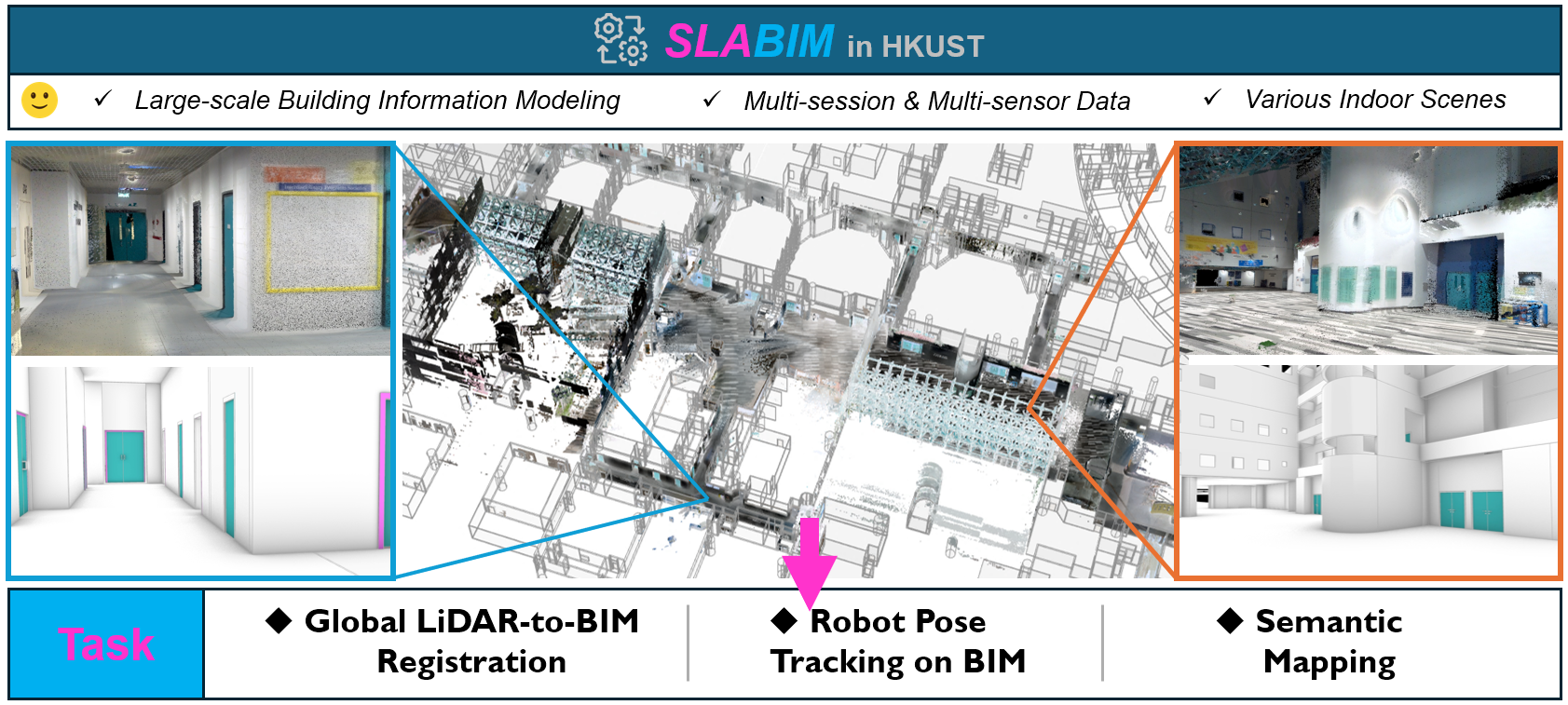
<div align="center"><h4>SLABIM is an open-sourced SLAM dataset that couples with BIM (Building Information Modeling).</h4></div>
|
| 35 |
+
|
| 36 |
+
<div align = "center"><img src="assets/overview.png" width="95%" /> </div>
|
| 37 |
+
|
| 38 |
+
**Features**:
|
| 39 |
+
+ **Large-scale Building Information Modeling**: The BIM model of this dataset is a part of the digital twin project in HKUST,
|
| 40 |
+
featuring various types of offices, classrooms, lounges, and corridors.
|
| 41 |
+
+ **Multi-session & Multi-sensor Data**: We collect 12 sessions across different floors and regions. These sessions encompass various indoor scenarios.
|
| 42 |
+
+ **Dataset Validation**: To demonstrate the practicality of SLABIM, we test three different tasks: (1) LiDAR-to-BIM registration, and (2) Robot pose tracking on BIM and (3) Semantic mapping.
|
| 43 |
+
|
| 44 |
+
## Dataset Structure
|
| 45 |
+
1. ```BIM/``` contains CAD files (.dxf) and mesh files (.ply) exported from the original BIM models, organized by storey and semantic tags. Users can sample
|
| 46 |
+
the meshes at specific densities to obtain point clouds, offering flexibility for various robotic tasks.
|
| 47 |
+
|
| 48 |
+
2. ```calibration files``` provide intrinsic camera parameters and the extrinsic parameters to the LiDAR.
|
| 49 |
+
|
| 50 |
+
3. In ```sensor data/``` directory, each session is named
|
| 51 |
+
```<X>F Region<Y>```, with X=1,3,4,5 and Y=1,2,3
|
| 52 |
+
indicating the storey and region of collection, such
|
| 53 |
+
as ```3F Region1```. This directory contains the **images**
|
| 54 |
+
and **points** produced by **camera** and **LiDAR**.
|
| 55 |
+
|
| 56 |
+
4. ```data <x>.bag```, x=0,1,2... is the **rosbag** encoding the raw information, which can be parsed using ROS tools.
|
| 57 |
+
|
| 58 |
+
5. ```sensor data/``` also contains the maps generated by SLAM, including **submap** for the LiDAR-to-BIM registration and **optimized map** by the offline mapping system.
|
| 59 |
+
|
| 60 |
+
6. ```pose_frame_to_bim.txt```, ```pose_map_to_bim.txt``` and ```pose_submap_to_bim.txt``` contains the **ground truth poses** from LiDAR scans and maps to the BIM coordinate. These poses are finely tuned using a manually
|
| 61 |
+
provided initial guess and local point cloud alignment.
|
| 62 |
+
|
| 63 |
+
```
|
| 64 |
+
SLABIM
|
| 65 |
+
├── BIM
|
| 66 |
+
│ └── <X>F
|
| 67 |
+
│ ├── CAD
|
| 68 |
+
│ │ └── <X>F.dxf
|
| 69 |
+
│ └── mesh
|
| 70 |
+
│ ├── columns.ply
|
| 71 |
+
│ ├── doors.ply
|
| 72 |
+
│ ├── floors.ply
|
| 73 |
+
│ └── walls.ply
|
| 74 |
+
├── calibration_files
|
| 75 |
+
│ ├── cam_intrinsics.txt
|
| 76 |
+
│ └── cam_to_lidar.txt
|
| 77 |
+
└── sensor_data
|
| 78 |
+
└── <X>F_Region<Y>
|
| 79 |
+
├── images
|
| 80 |
+
│ ├── data
|
| 81 |
+
│ │ └── <frame_id>.png
|
| 82 |
+
│ └── timestamps.txt
|
| 83 |
+
├── map
|
| 84 |
+
│ ├── data
|
| 85 |
+
│ │ ├── colorized.las
|
| 86 |
+
│ │ └── uncolorized.ply
|
| 87 |
+
│ └── pose_map_to_bim.txt
|
| 88 |
+
├── points
|
| 89 |
+
│ ├── data
|
| 90 |
+
│ │ └── <frame_id>.pcd
|
| 91 |
+
│ ├── pose_frame_to_bim.txt
|
| 92 |
+
│ └── timestamps.txt
|
| 93 |
+
├── rosbag
|
| 94 |
+
│ └── data_<x>.bag
|
| 95 |
+
└── submap
|
| 96 |
+
��── data
|
| 97 |
+
│ └── <submap_id>.pcd
|
| 98 |
+
└── pose_submap_to_bim.txt
|
| 99 |
+
```
|
| 100 |
+
|
| 101 |
+
|
| 102 |
+
<!-- ## Multi-session SLAM Dataset
|
| 103 |
+
<div align="left">
|
| 104 |
+
<img src="assets/1F.png" width=28.6% />
|
| 105 |
+
<img src="assets/3Fto5F.png" width=30.6% />
|
| 106 |
+
<img src="assets/colormap.gif" width = 39.3% >
|
| 107 |
+
</div> -->
|
| 108 |
+
|
| 109 |
+
## Data Acquisition Platform
|
| 110 |
+
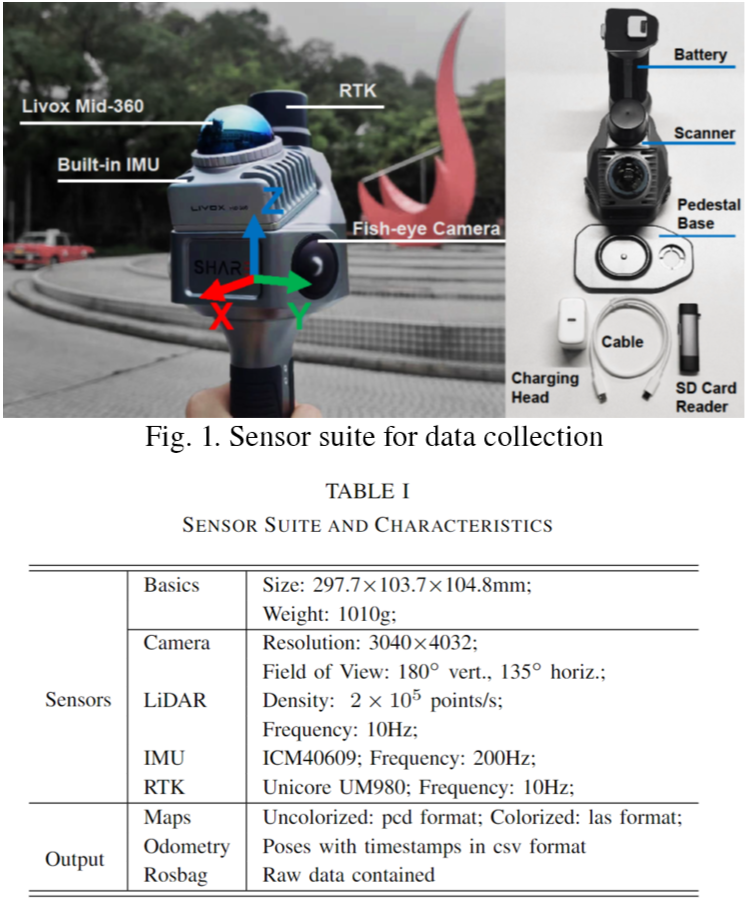
The handheld sensor suite is illustrated in the Figure 1. A more detailed summary of the characteristics can be found in the Table 1.
|
| 111 |
+
<div align="left">
|
| 112 |
+
<img src="assets/sensor_suite.png" width=38.3% />
|
| 113 |
+
<img src="assets/collection.gif" width = 60.6% >
|
| 114 |
+
</div>
|
| 115 |
+
|
| 116 |
+
## Qualitative Results on SLABIM
|
| 117 |
+
### Global LiDAR-to-BIM Registration
|
| 118 |
+
Global LiDAR-to-BIM registration aims to estimate a transformation from scratch between the LiDAR submap and the BIM coordinate system. A robot can localize itself globally by aligning the online built submap to the BIM.
|
| 119 |
+
|
| 120 |
+
<div align = "center"><img src="assets/registration.gif" width="35%" /> </div>
|
| 121 |
+
|
| 122 |
+
### Robot Pose Tracking on BIM
|
| 123 |
+
Different from LiDAR-to-BIM, Pose tracking requires estimating poses given the initial state and sequential measurements.
|
| 124 |
+
|
| 125 |
+
<div align = "center"><img src="assets/pose_tracking.gif" width="35%" /> </div>
|
| 126 |
+
|
| 127 |
+
### Semantic Mapping
|
| 128 |
+
We deploy [FM-Fusion](https://arxiv.org/abs/2402.04555)[1] on SLABIM. For the ground truth, we convert the HKUST BIM into semantic point cloud maps using the semantic tags in BIM. Both maps contain four semantic categories: floor, wall, door, and
|
| 129 |
+
column, the common elements in indoor environments
|
| 130 |
+
<div align = "center"><img src="assets/semantic_mapping.gif" width="35%" /> </div>
|
| 131 |
+
|
| 132 |
+
[1] C. Liu, K. Wang, J. Shi, Z. Qiao, and S. Shen, “Fm-fusion: Instance-
|
| 133 |
+
aware semantic mapping boosted by vision-language foundation mod-
|
| 134 |
+
els,” IEEE Robotics and Automation Letters, 2024
|
| 135 |
+
## Acknowledgements
|
| 136 |
+
We sincerely thank Prof. Jack C. P. Cheng for generously
|
| 137 |
+
providing the original HKUST BIM files.
|
| 138 |
+
|
| 139 |
+
<!-- ## Citation
|
| 140 |
+
If you find SLABIM is useful in your research or applications, please consider giving us a star 🌟 and citing it by the following BibTeX entry. -->
|
| 141 |
+
<!-- ```bibtex
|
| 142 |
+
@ARTICLE{qiao2024g3reg,
|
| 143 |
+
author={Qiao, Zhijian and Yu, Zehuan and Jiang, Binqian and Yin, Huan and Shen, Shaojie},
|
| 144 |
+
journal={IEEE Transactions on Automation Science and Engineering},
|
| 145 |
+
title={G3Reg: Pyramid Graph-Based Global Registration Using Gaussian Ellipsoid Model},
|
| 146 |
+
year={2024},
|
| 147 |
+
volume={},
|
| 148 |
+
number={},
|
| 149 |
+
pages={1-17},
|
| 150 |
+
keywords={Point cloud compression;Three-dimensional displays;Laser radar;Ellipsoids;Robustness;Upper bound;Uncertainty;Global registration;point cloud;LiDAR;graph theory;robust estimation},
|
| 151 |
+
doi={10.1109/TASE.2024.3394519}}
|
| 152 |
+
```
|
| 153 |
+
```bibtex
|
| 154 |
+
@inproceedings{qiao2023pyramid,
|
| 155 |
+
title={Pyramid Semantic Graph-based Global Point Cloud Registration with Low Overlap},
|
| 156 |
+
author={Qiao, Zhijian and Yu, Zehuan and Yin, Huan and Shen, Shaojie},
|
| 157 |
+
booktitle={2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
|
| 158 |
+
pages={11202--11209},
|
| 159 |
+
year={2023},
|
| 160 |
+
organization={IEEE}
|
| 161 |
+
}
|
| 162 |
+
``` -->
|
assets/collection.gif
ADDED
|
Git LFS Details
|
assets/logo.png
ADDED
|
|
Git LFS Details
|
assets/overview.png
ADDED
|
Git LFS Details
|
assets/pose_tracking.gif
ADDED
|
|
Git LFS Details
|
assets/registration.gif
ADDED
|
Git LFS Details
|
assets/semantic_mapping.gif
ADDED
|
Git LFS Details
|
assets/sensor_suite.png
ADDED
|
Git LFS Details
|