
The full dataset viewer is not available (click to read why). Only showing a preview of the rows.
Error code: JobManagerCrashedError
Need help to make the dataset viewer work? Make sure to review how to configure the dataset viewer, and open a discussion for direct support.
image
image |
|---|
 SLABIM:
SLABIM:
A SLAM-BIM Coupled Dataset in HKUST Main Building
Haoming Huang, Zhijian Qiao, Zehuan Yu, Chuhao Liu, Shaojie Shen, Fumin Zhang and Huan Yin
Submitted to 2025 IEEE International Conference on Robotics & Automation
News
17 Feb 2025: Download Links Updated.28 Jan 2025: Accepted by ICRA 2025.15 Sep 2024: We submit our paper to IEEE ICRA.
Abstract
SLABIM is an open-sourced SLAM dataset that couples with BIM (Building Information Modeling).
Features:
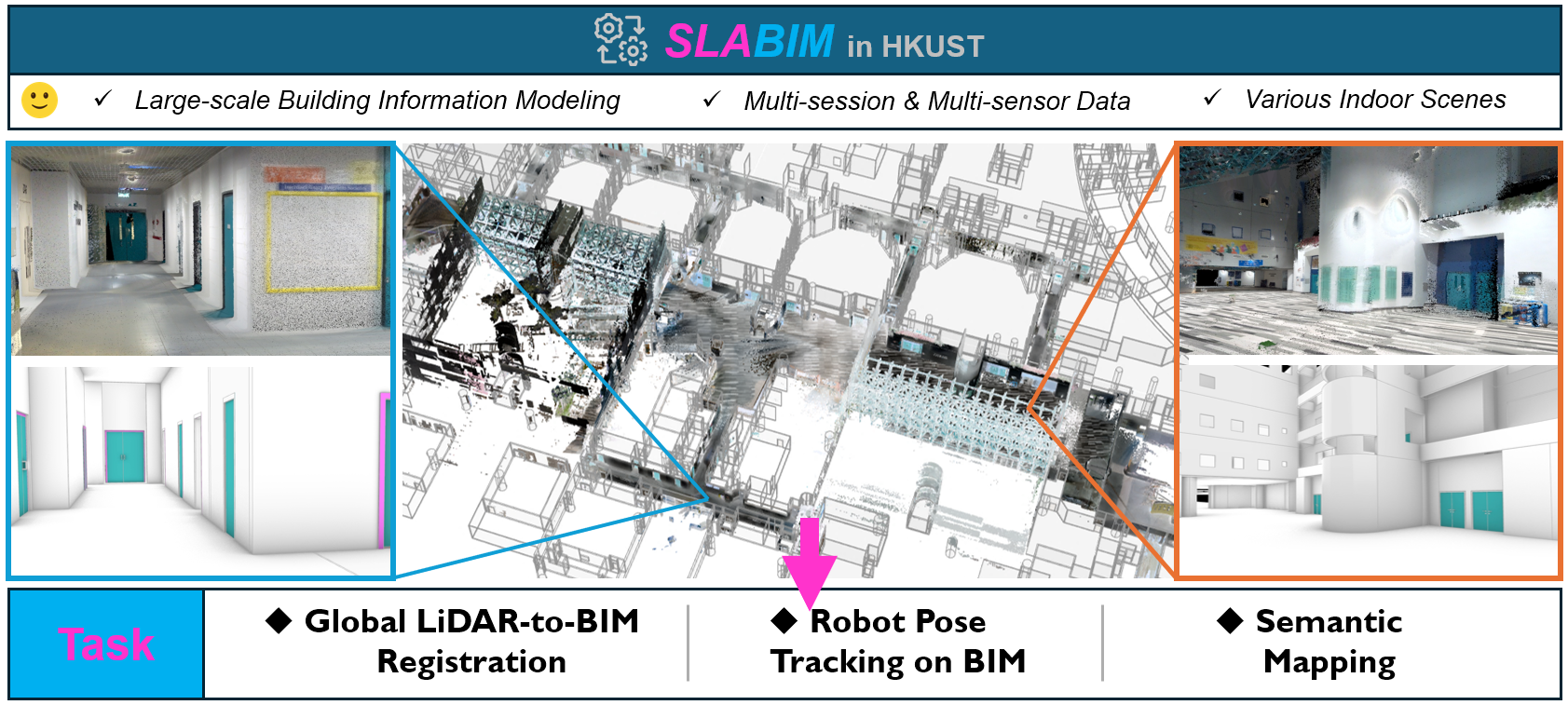
- Large-scale Building Information Modeling: The BIM model of this dataset is a part of the digital twin project in HKUST, featuring various types of offices, classrooms, lounges, and corridors.
- Multi-session & Multi-sensor Data: We collect 12 sessions across different floors and regions. These sessions encompass various indoor scenarios.
- Dataset Validation: To demonstrate the practicality of SLABIM, we test three different tasks: (1) LiDAR-to-BIM registration, and (2) Robot pose tracking on BIM and (3) Semantic mapping.
Dataset Structure
BIM/contains CAD files (.dxf) and mesh files (.ply) exported from the original BIM models, organized by storey and semantic tags. Users can sample
the meshes at specific densities to obtain point clouds, offering flexibility for various robotic tasks.
calibration filesprovide intrinsic camera parameters and the extrinsic parameters to the LiDAR.In
sensor data/directory, each session is named
<X>F Region<Y>, with X=1,3,4,5 and Y=1,2,3
indicating the storey and region of collection, such
as 3F Region1. This directory contains the images
and points produced by camera and LiDAR.
data <x>.bag, x=0,1,2... is the rosbag encoding the raw information, which can be parsed using ROS tools.sensor data/also contains the maps generated by SLAM, including submap for the LiDAR-to-BIM registration and optimized map by the offline mapping system.pose_frame_to_bim.txt,pose_map_to_bim.txtandpose_submap_to_bim.txtcontains the ground truth poses from LiDAR scans and maps to the BIM coordinate. These poses are finely tuned using a manually
provided initial guess and local point cloud alignment.
SLABIM
├── BIM
│ └── <X>F
│ ├── CAD
│ │ └── <X>F.dxf
│ └── mesh
│ ├── columns.ply
│ ├── doors.ply
│ ├── floors.ply
│ └── walls.ply
├── calibration_files
│ ├── cam_intrinsics.txt
│ └── cam_to_lidar.txt
└── sensor_data
└── <X>F_Region<Y>
├── images
│ ├── data
│ │ └── <frame_id>.png
│ └── timestamps.txt
├── map
│ ├── data
│ │ ├── colorized.las
│ │ └── uncolorized.ply
│ └── pose_map_to_bim.txt
├── points
│ ├── data
│ │ └── <frame_id>.pcd
│ ├── pose_frame_to_bim.txt
│ └── timestamps.txt
├── rosbag
│ └── data_<x>.bag
└── submap
├── data
│ └── <submap_id>.pcd
└── pose_submap_to_bim.txt
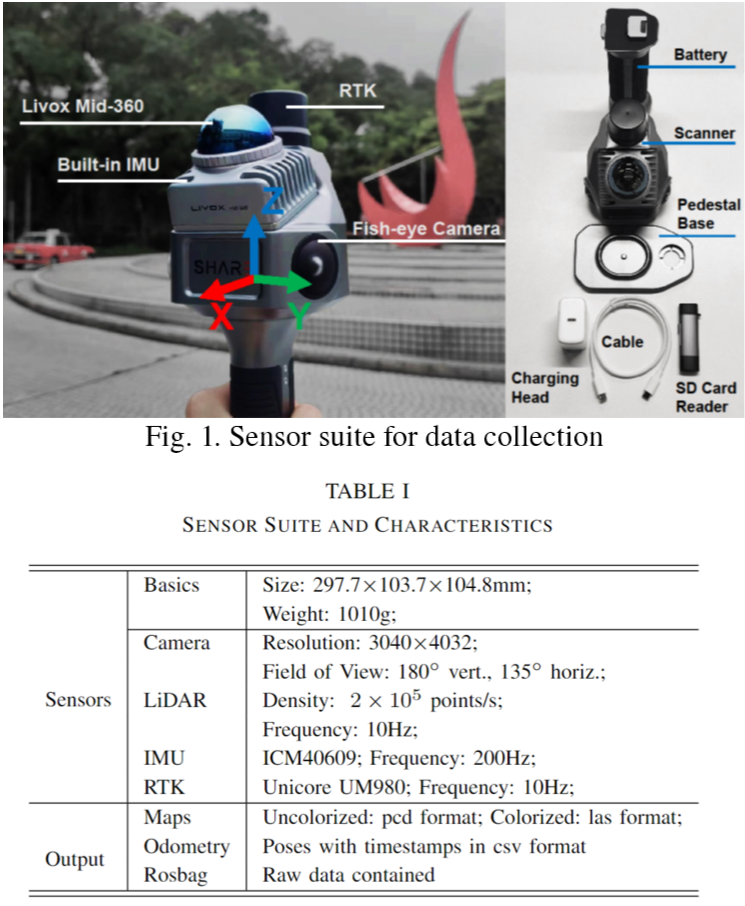
Data Acquisition Platform
The handheld sensor suite is illustrated in the Figure 1. A more detailed summary of the characteristics can be found in the Table 1.
Qualitative Results on SLABIM
Global LiDAR-to-BIM Registration
Global LiDAR-to-BIM registration aims to estimate a transformation from scratch between the LiDAR submap and the BIM coordinate system. A robot can localize itself globally by aligning the online built submap to the BIM.
Robot Pose Tracking on BIM
Different from LiDAR-to-BIM, Pose tracking requires estimating poses given the initial state and sequential measurements.
Semantic Mapping
We deploy FM-Fusion[1] on SLABIM. For the ground truth, we convert the HKUST BIM into semantic point cloud maps using the semantic tags in BIM. Both maps contain four semantic categories: floor, wall, door, and column, the common elements in indoor environments
[1] C. Liu, K. Wang, J. Shi, Z. Qiao, and S. Shen, “Fm-fusion: Instance- aware semantic mapping boosted by vision-language foundation mod- els,” IEEE Robotics and Automation Letters, 2024
Acknowledgements
We sincerely thank Prof. Jack C. P. Cheng for generously providing the original HKUST BIM files.
- Downloads last month
- 111